Para la obtención del Jacobiano del manipulador
se deben tener las velocidades lineal y angular de cada uno de
los planos del sistema de robot de tres grados de libertad, con
el método de la velocidad de
propagación.
Velocidades del primer plano:
Angular

La velocidad angular del plano cero es nula, ya que no
tiene niguna rotación por ser el plano de referencia para
los demás planos. Remplazando

Velocidad lineal
En el primer plano no existe de movimiento de
translación por consiguiente la velocidad lineal es
cero.
![]()
Velocidades del segundo plano:
Velocidad angular

Velocidad lineal:

Solución del producto cruz
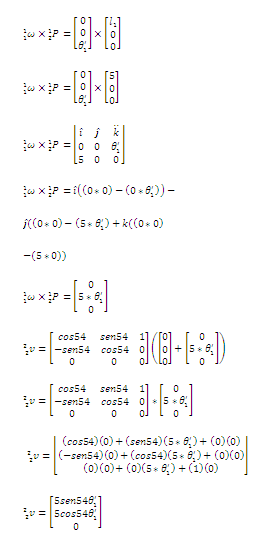
Velocidades del tercer plano
Velocidad angular
AL tener el mismo ángulo de rotación el
plano tres con el dos la velocidad angular es igual.

Velocidad lineal

Solución del producto cruz

Remplazando en la ecuación (1)

Por tanto el Jacobiano expresado en el plano tres
es:

La velocidad del plano tres expresada en el plano de
referencia cero:

Se realiza el producto entre las matrices

El jacobiano expresado en 3 es:

El vector es la relación de las velocidades
articulares con las velocidades cartesianas del
extremo.
Conclusiones
El proceso del jacobiano permite un cálculo
concreto de la velocidad de las articulaciones de un robot
manipulador, sin importar cuantas tenga, y permite la
relación de la velocidad angular y lineal.
Referencias
bibliográficas
Ollero Baturone, Aníbal (2001). Robótica;
manipuladores y robots móviles. Marcombo, s.a.
Barrientos Peñin, Balaguer Araci, (2007);
Fundamentos de robótica. McGraw Hill.
Fu, K.S. (1987). Robótica: control,
detección, visión e inteligencia. McGraw
Hill.
Autor:
Nadia Villa
 Página anterior Página anterior | Volver al principio del trabajo | Página siguiente  |